Aufgabe 2
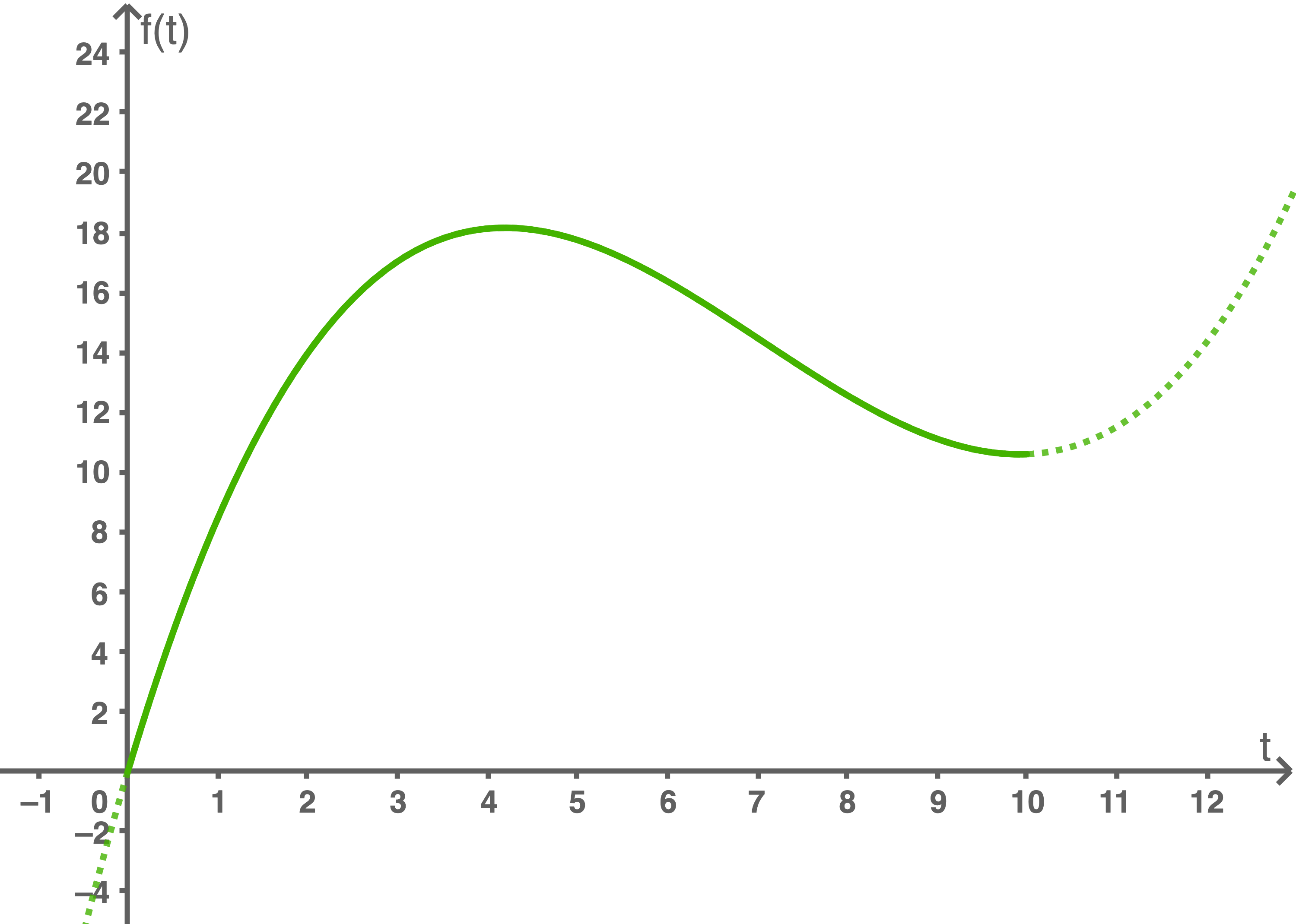
Das Jagdverhalten von Raubkatzen in der freien Wildbahn ist gekennzeichnet durch eine hohe Anfangsbeschleunigung. Darauf folgt eine kurze Phase mit annähernd konstanter Geschwindigkeit, bevor die Geschwindigkeit wieder abfällt.
Die Geschwindigkeit eines Tigers bei einem Jagdvorgang aus der Ruheposition heraus wird für zunächst ohne Berücksichtigung der Phase mit konstanter Geschwindigkeit modelliert. Dazu wird für die Funktion
zunächst ohne Berücksichtigung der Phase mit konstanter Geschwindigkeit modelliert. Dazu wird für die Funktion  mit
mit

 verwendet. Dabei gibt
verwendet. Dabei gibt  die Zeit seit Verlassen der Ruheposition in Sekunden und
die Zeit seit Verlassen der Ruheposition in Sekunden und  die Geschwindigkeit in
die Geschwindigkeit in  an.
an.
Die Geschwindigkeit eines Tigers bei einem Jagdvorgang aus der Ruheposition heraus wird für
Abbildung 1
a)
(1)
Gib den Funktionswert von für  an und interpretiere diesen Wert im Sachzusammenhang.
an und interpretiere diesen Wert im Sachzusammenhang.
(2)
Weise rechnerisch nach, dass der Tiger seine Maximalgeschwindigkeit von ca.  ungefähr
ungefähr  Sekunden nach Verlassen der Ruheposition erreicht, und gib die Maximalgeschwindigkeit in
Sekunden nach Verlassen der Ruheposition erreicht, und gib die Maximalgeschwindigkeit in  an.
an.
(3 + 8 Punkte)
b)
(1)
Erläutere die Bedeutung der ersten Ableitung von im Sachzusammenhang.
(2)
Ermittle den Zeitpunkt, zu dem die Geschwindigkeit am stärksten abnimmt, auf zwei Nachkommastellen genau.
(2 + 4 Punkte)
c)
Ermittle das Zeitintervall, in dem die Geschwindigkeit des Tigers mindestens  beträgt.
beträgt.
(4 Punkte)
d)
(1)
Berechne  und erläutere die Bedeutung dieses Wertes im Sachzusammenhang.
und erläutere die Bedeutung dieses Wertes im Sachzusammenhang.
(2)
Ermittle die Durchschnittsgeschwindigkeit des Tigers in den modellierten 
(6 + 2 Punkte)
e)
Nimm an, dass der Tiger zunächst seine Maximalgeschwindigkeit gemäß dem oberen Modell erreicht (Phase 1). Nach Erreichen seiner Maximalgeschwindigkeit behält er diese noch  lang bei (Phase 2). Anschließend verringert sich seine Geschwindigkeit gemäß einem neuen Modell (Phase 3). Dieses entspricht bis auf eine zeitliche Verschiebung dem oberen Modell (vgl. Abbildung 2). Ab
lang bei (Phase 2). Anschließend verringert sich seine Geschwindigkeit gemäß einem neuen Modell (Phase 3). Dieses entspricht bis auf eine zeitliche Verschiebung dem oberen Modell (vgl. Abbildung 2). Ab  läuft er mit konstanter Geschwindigkeit weiter (Phase 4). Im Folgenden werden die ersten
läuft er mit konstanter Geschwindigkeit weiter (Phase 4). Im Folgenden werden die ersten  (Phase 1 bis 3) dieses Ablaufs betrachtet.
(Phase 1 bis 3) dieses Ablaufs betrachtet.
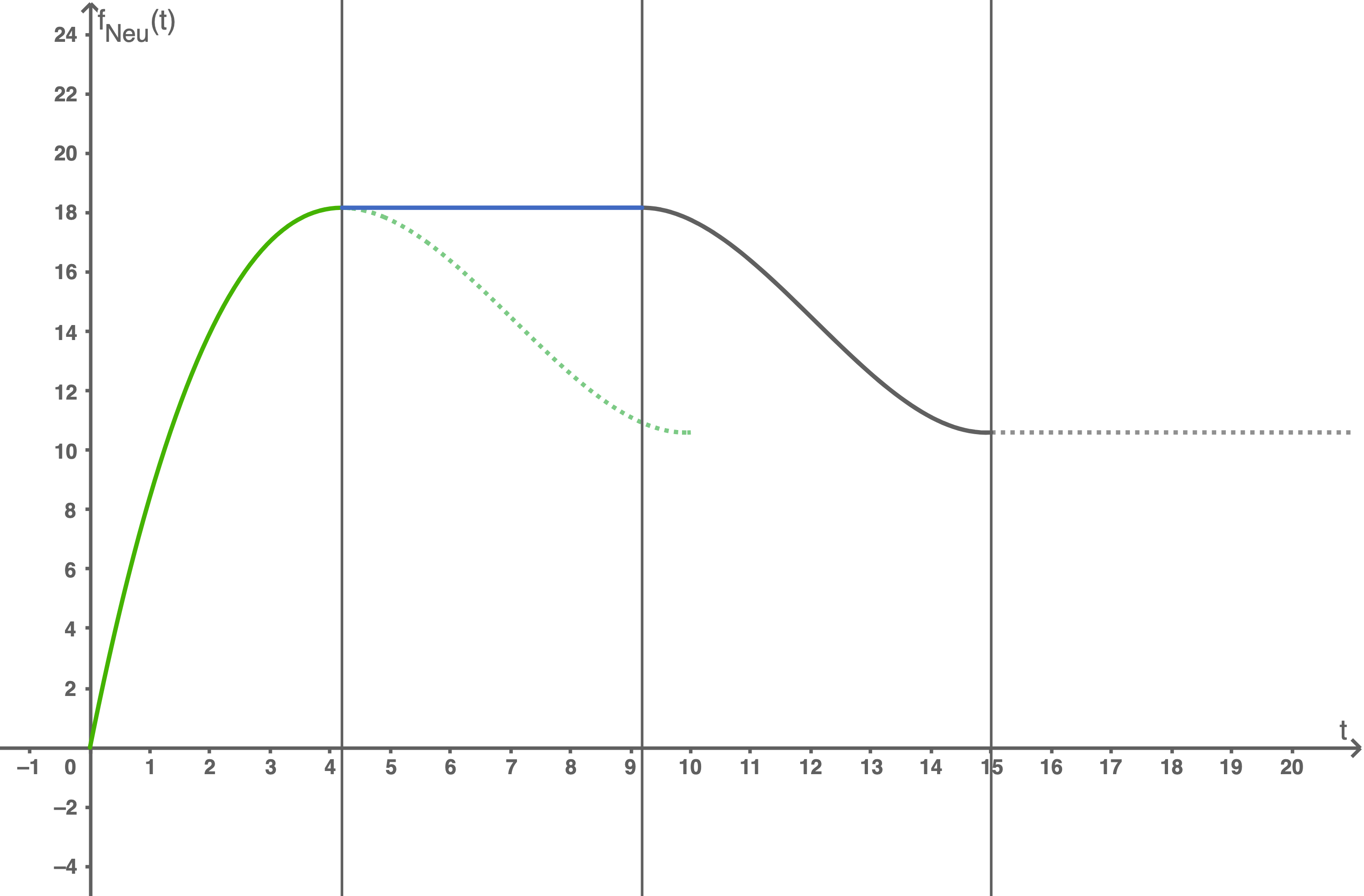
Abbildung 2
(1)
Gib für die Phasen 2 und 3 jeweils einen Funktionsterm an.
[Hinweis: Der Term für Phase 3 muss nicht vereinfacht werden.]
[Hinweis: Der Term für Phase 3 muss nicht vereinfacht werden.]
(2)
Prüfe, ob nach ein knickfreier Übergang zu einer konstanten Funktion, welche die Geschwindigkeit in Phase 4 modelliert, möglich ist.
(3)
Ermittle die Länge der Strecke, die der Tiger in diesen ersten zurücklegt.
(4 + 3 + 4 Punkte)
a)
(1)
Einsetzen von in die Funktionsgleichung:  .
.
Der Tiger hat nach eine Geschwindigkeit von
eine Geschwindigkeit von  .
.
Der Tiger hat nach
(2)
Die Maximalgeschwindigkeit kann über das Maximum ermittelt werden.
Die Ableitungsfunktion lautet :  Nullstellen für
Nullstellen für  liefert der GTR im Intervall
liefert der GTR im Intervall ![\([0,10]\)](https://mathjax.schullv.de/f0a5fc7603ec6f5bf5258572dec467de75f1bfab1842d819880219d4f6b95590?color=5a5a5a) bei
bei  und
und  .
Die zugehörigen Funktionswerte lauten:
.
Die zugehörigen Funktionswerte lauten:  und
und  . Das Maximum könnte jedoch auch am Rand angenommen werden. Wegen
. Das Maximum könnte jedoch auch am Rand angenommen werden. Wegen  und
und  ist dies jedoch ausgeschlossen.
ist dies jedoch ausgeschlossen.
Der Tiger hat somit nach ca seine Höchstgeschwindigkeit
seine Höchstgeschwindigkeit  erreicht.
erreicht.
Der Tiger hat somit nach ca
b)
(1)
Die erste Ableitung ist die momentane Änderungsrate. Sie gibt die momentane Beschleunigung des Tigers nach seinem Start aus der Ruhe an.
(2)
Die Stelle, an der die Geschwindigkeit am stärksten abnimmt, ist das Minimum der Ableitungsfunktion. Mit dem GTR ist das Minimum bei  bestimmt und somit auch der Zeitpunkt, an dem die Geschwindigkeit des Tigers am stärksten abnimmt.
bestimmt und somit auch der Zeitpunkt, an dem die Geschwindigkeit des Tigers am stärksten abnimmt.
c)
Für  liefert der GTR mehrere Werte für :
liefert der GTR mehrere Werte für :
 ,
,  und
und  . Da wir das Intervall betrachten, wird der letzte Wert
. Da wir das Intervall betrachten, wird der letzte Wert  nicht beachtet.
Wird das Zeitintervall mit der Verlauf des Graphen betrachtet, beginnt das gesuchte Zeitintervall nach ca.
nicht beachtet.
Wird das Zeitintervall mit der Verlauf des Graphen betrachtet, beginnt das gesuchte Zeitintervall nach ca.  und endet ca.
und endet ca.  nach dem Start des Tigers aus der Ruhe.
nach dem Start des Tigers aus der Ruhe.
d)
(1)
Eine Stammfunktion von ist  .
Berechnen des Integrals im Intervall :
.
Berechnen des Integrals im Intervall :
 Der Tiger legt somit einen Weg von
Der Tiger legt somit einen Weg von  nach
nach  zurück.
zurück.
(2)
Die Durchchnittsgeschwindigkeit kann berechnet werden mit: 
Der Tiger erreicht somit in den modellierten eine durchschnittliche Geschwindigkeit von 
Der Tiger erreicht somit in den modellierten
e)
(1)
Die Phasen befinden sich auf den folgenden Intervallen:
Phase 2: ![\([4,2; 9,2]\)](https://mathjax.schullv.de/f5a08667a1d43bfdf3e4ba68be0c4a923ced76749b483fe24fa1062b9c89af17?color=5a5a5a) und Phase 3:
und Phase 3: ![\([9,2; 15].\)](https://mathjax.schullv.de/4470eeb6660b489556ce7eb7d7123739f471dce61b662df2bade32549beb6bad?color=5a5a5a) In Phase 2 läuft der Tiger mit seiner Maximalgeschwindigkeit
In Phase 2 läuft der Tiger mit seiner Maximalgeschwindigkeit  Diese wurde bereits berechnet. Die Höchstgeschwindigkeit beträgt
Diese wurde bereits berechnet. Die Höchstgeschwindigkeit beträgt  Phase 3 entspricht dem Graphen von Abbildung 1 im Intervall
Phase 3 entspricht dem Graphen von Abbildung 1 im Intervall ![\([5,10].\)](https://mathjax.schullv.de/e655bd0cd72586a47209e30c5c1de882bde15cb8ab79656d1fa5689ec2654dff?color=5a5a5a) Also auch der Funktion von , jedoch um
Also auch der Funktion von , jedoch um  auf der -Achse verschoben.
auf der -Achse verschoben.
Ein Term für Phase 3 lautet folglich
Ein Term für Phase 3 lautet folglich
(2)
Der Übergang zu einer konstanten Funktion ist knickfrei, wenn diese parallel zur -Achse ist, also die Steigung Null.
 Die Tangente ist nur näherungsweise parallel und der Übergang somit nicht knickfrei.
Die Tangente ist nur näherungsweise parallel und der Übergang somit nicht knickfrei.
(3)
Die Länge der Strecken können über ein Flächenntegral ermittelt werden.
Die Grenzen entsprechen demjenigen Intervall, in welchem die Phase ist. Integriert werden muss nur, wenn der Graph im Intervall eine Fläche einschließt. Phase 1 läuft im Intervall ![\([0; 4,2]\)](https://mathjax.schullv.de/0a154bcc636a5384e37f1f0d8a12e9abba4fe9f262bb4ee79bf4e2dd4311347c?color=5a5a5a) und Phase 3 im Intervall
und Phase 3 im Intervall ![\([9,2; 15]\)](https://mathjax.schullv.de/e124455048fa2a0c60960cddea8a2c3703598d88dc99e680156ee5fef3434289?color=5a5a5a) .
Die gesuchte Länge entspricht also:
.
Die gesuchte Länge entspricht also: