C1 - Lineare Algebra, Analytische Geometrie
1
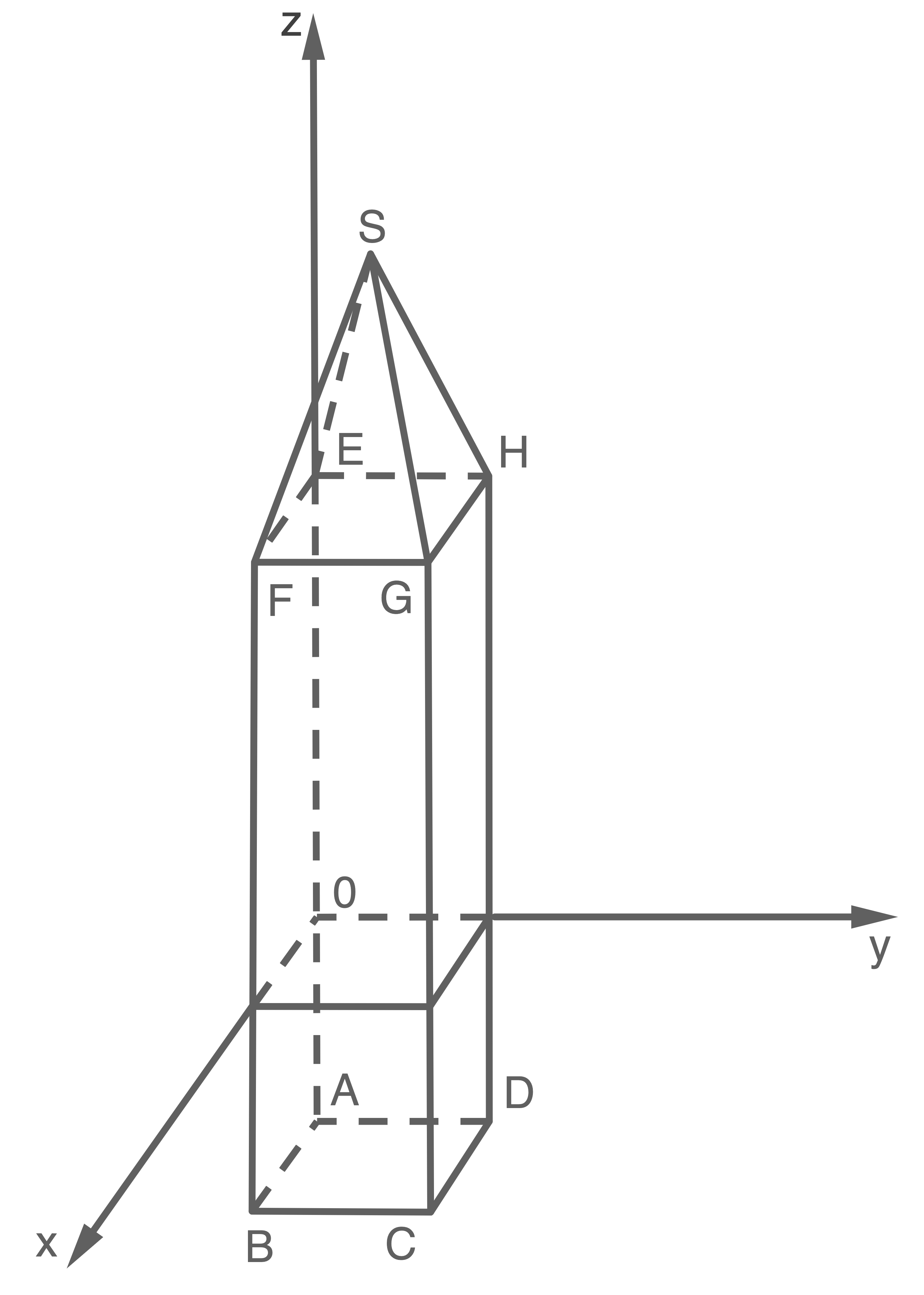
In Südtirol ragt im aufgestauten Reschensee ein versunkener Kirchturm empor
Zur Beschreibung des Kirchturms wird ein räumliches Koordinatensystem gewählt. Die Wasseroberfläche liegt in der  -
- -Ebene. Eine Einheit in dem Koordinatensystem entspricht einem Meter.
Der Kirchturm besteht aus einem
-Ebene. Eine Einheit in dem Koordinatensystem entspricht einem Meter.
Der Kirchturm besteht aus einem  hohen, quaderförmigen unteren Teil mit
hohen, quaderförmigen unteren Teil mit  großer quadratischer Grundfläche. Darüber befindet sich ein
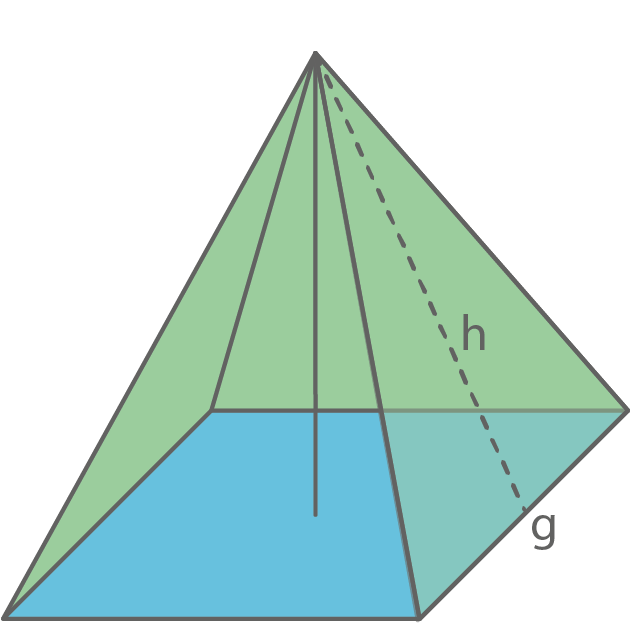
großer quadratischer Grundfläche. Darüber befindet sich ein  hohes, symmetrisches Dach in Form einer Pyramide. Je nach Wasserstand ragt der Turm unterschiedlich weit aus dem Reschensee empor.
hohes, symmetrisches Dach in Form einer Pyramide. Je nach Wasserstand ragt der Turm unterschiedlich weit aus dem Reschensee empor.

1.1
Zu einem bestimmten Zeitpunkt befindet sich die Grundfläche  des Turmes
des Turmes  unter der Wasseroberfläche. Die Kante
unter der Wasseroberfläche. Die Kante  liegt auf der
liegt auf der  -Achse.
Gib die Koordinaten der Punkte
-Achse.
Gib die Koordinaten der Punkte  und
und  in Material 2 an.
in Material 2 an.
(5 BE)
1.2
Für eine Restaurierung im Jahr 2009 wurde das Dach erneuert.
Berechne den Flächeninhalt der Dachfläche.
(4 BE)
2
Zur Untersuchung des Reschensees wurden zwei Tauchroboter  und
und  eingesetzt, die sich mit konstanten Geschwindigkeiten auf geradlinigen Bahnen unter Wasser fortbewegen und Daten an eine Forschungsstation senden. Im Verlauf des ersten Tauchgangs werden folgende Ortungsdaten gesendet:
Ortungsdaten von
eingesetzt, die sich mit konstanten Geschwindigkeiten auf geradlinigen Bahnen unter Wasser fortbewegen und Daten an eine Forschungsstation senden. Im Verlauf des ersten Tauchgangs werden folgende Ortungsdaten gesendet:
Ortungsdaten von  Zum Zeitpunkt
Zum Zeitpunkt  Zum Zeitpunkt
Zum Zeitpunkt  Ortungsdaten von
Ortungsdaten von  Zum Zeitpunkt
Zum Zeitpunkt  Zum Zeitpunkt
Zum Zeitpunkt 
2.1
Bestimme die Parametergleichungen der beiden Geraden, die die Tauchbahnen der Roboter modellieren.
(4 BE)
2.2
Ermittle den Schnittpunkt  der beiden Geraden aus Aufgabenteil 2.1.
der beiden Geraden aus Aufgabenteil 2.1.
 zur Kontrolle:
zur Kontrolle: ![\(T(12\mid -1\mid -7)\bigg]\)](https://mathjax.schullv.de/6761e19ee44c1c0238c9881539d472f737f5923d91892cf154a65acac1a3f641?color=5a5a5a)
(4 BE)
2.3
Die beiden Roboter starten gleichzeitig vom Punkt  bzw.
bzw.  zum Zeitpunkt
zum Zeitpunkt  und bewegen sich auf ihren Tauchbahnen zum Schnittpunkt
und bewegen sich auf ihren Tauchbahnen zum Schnittpunkt  Begründe, dass der Schnittpunkt auf dem Weg des Roboters nicht zwischen und
Begründe, dass der Schnittpunkt auf dem Weg des Roboters nicht zwischen und  liegt, und ermittle die Koordinaten des Punktes
liegt, und ermittle die Koordinaten des Punktes  an dem sich befindet, wenn der Tauchroboter am Schnittpunkt angelangt ist.
an dem sich befindet, wenn der Tauchroboter am Schnittpunkt angelangt ist.
(4 BE)
2.4
Berechne den Winkel  zwischen den beiden Vektoren
zwischen den beiden Vektoren  und
und 
Deute den Winkel im Sachzusammenhang.
im Sachzusammenhang.
Bei den folgenden Aufgaben werden die Tauchroboter als punktförmig angesehen.
Deute den Winkel
(4 BE)
2.5
Bei einem zweiten Tauchgang kann man ab einem bestimmten Zeitpunkt die Tauchbahnen der beiden Tauchroboter und folgendermaßen beschreiben:
 und
und 
Dabei ist die Zeit in Minuten ab diesem Zeitpunkt.
Die Vektorgleichung
die Zeit in Minuten ab diesem Zeitpunkt.
Die Vektorgleichung 
 besitzt die Lösung
besitzt die Lösung  Deute diese Lösung im Sachzusammenhang.
Deute diese Lösung im Sachzusammenhang.
Dabei ist
(3 BE)
3
Im Reschensee befindet sich ein feinmaschiges ebenes Netz. Das Netz verläuft durch die Punkte  ,
,  und
und 
3.1
Gib eine Parametergleichung der Ebene  an, in der das Netz liegt, und bestimme eine Koordinatengleichung dieser Ebene
an, in der das Netz liegt, und bestimme eine Koordinatengleichung dieser Ebene  eine mögliche Koordinatengleichung von lautet:
eine mögliche Koordinatengleichung von lautet: ![\(8x-12y+2z=-103\bigg]\)](https://mathjax.schullv.de/a5ab10377961a0f0815151ccbd6a3af30ac774990fb4c7aa7e727cf33a948490?color=5a5a5a)
(6 BE)
3.2
Ein weiterer Tauchroboter  ist mit Sensoren ausgestattet, die bei einer Abstandsunterschreitung von 2 Metern zu einem Hindernis Alarm auslösen. Der Roboter befindet sich im Punkt
ist mit Sensoren ausgestattet, die bei einer Abstandsunterschreitung von 2 Metern zu einem Hindernis Alarm auslösen. Der Roboter befindet sich im Punkt  in der Nähe des Netzes.
Zeige, dass die Sensoren an diesem Punkt keinen Alarm auslösen.
in der Nähe des Netzes.
Zeige, dass die Sensoren an diesem Punkt keinen Alarm auslösen.
(6 BE)
Weiter lernen mit SchulLV-PLUS!
monatlich kündbarSchulLV-PLUS-Vorteile im ÜberblickDu hast bereits einen Account?
1
1.1
Aus Grundfläche des Quaders ergibt sich die Grundseitenlänge  Da die Grundfläche unter der Wasseroberfläche liegt, folgen die Koordinaten der Punkte im Koordinatensystem mit:
Da die Grundfläche unter der Wasseroberfläche liegt, folgen die Koordinaten der Punkte im Koordinatensystem mit:





1.2
2
2.1
Parametergleichung des ersten Tauchroboters:
![\(\begin{array}[t]{rll}
g_{1}: \overrightarrow{x}&=& P_{1} + t \cdot \overrightarrow{P_{1}P_{2}} & \\[5pt]
&=&\pmatrix{24\\8\\-1} + t \cdot \pmatrix{-4\\-3\\-2}
\end{array}\)](https://mathjax.schullv.de/1c72fa06085ab9e5dc448f39f76ab37dddb27d3d5b2168ce4259dd95d68c406d?color=5a5a5a) Parametergleichung des zweiten Tauchroboters:
Parametergleichung des zweiten Tauchroboters:
![\(\begin{array}[t]{rll}
g_{2}: \overrightarrow{x}&=& Q_{1} + s \cdot \overrightarrow{Q_{1}Q_{2}} & \\[5pt]
&=& \pmatrix{15\\0\\-5,5} + s \cdot \pmatrix{-6\\-2\\-3}
\end{array}\)](https://mathjax.schullv.de/bdda0d3fa4cf852a7667157b0fa56fe918884749878b2b4071ef77e7288650be?color=5a5a5a)
2.2
Gleichsetzen von  und
und  liefert:
liefert:

 Auflösen der 1. Zeile nach
Auflösen der 1. Zeile nach  ergibt:
ergibt:
![\(\begin{array}[t]{rll}
24 - 4t&= 15 - 6s& \quad \scriptsize \,\big \vert \, -24 \\[5pt]
-4t&= -9 - 6s& \quad \scriptsize \,\big \vert \, :(-4) \\[5pt]
t &= \dfrac{9}{4} + \dfrac{3}{2}s
\end{array}\)](https://mathjax.schullv.de/3ee6d510c392d2c129cecef02e09c13c03e7f227929b5f4b4742a58d74b26d51?color=5a5a5a) Durch Einsetzen von in die 2. Zeile folgt:
Durch Einsetzen von in die 2. Zeile folgt:
![\(\begin{array}[t]{rll}
8 - 3t&=& -2s & \\[5pt]
8 - 3\cdot \left(\dfrac{9}{4} + \dfrac{3}{2}s\right)&=& -2s & \\[5pt]
8 - \dfrac{27}{4} - \dfrac{9}{2}s&=& -2s&\quad \scriptsize \mid\;+\dfrac{9}{2}s \\[5pt]
\dfrac{5}{4} &=&\dfrac{5}{2}s &\quad \scriptsize \mid\; \cdot \ \dfrac{2}{5}\\[5pt]
\dfrac{1}{2} &=& s
\end{array}\)](https://mathjax.schullv.de/44dbaeb9dac82e4e0f5675c2898d857c9a6c701e97a1be211762674ebf557319?color=5a5a5a) Damit ergibt sich für :
Damit ergibt sich für :
![\(\begin{array}[t]{rll}
t&=& \dfrac{9}{4} + \dfrac{3}{2}s& \\[5pt]
&=& \dfrac{9}{4} + \dfrac{3}{2}\cdot \dfrac{1}{2}& \\[5pt]
&=& 3
\end{array}\)](https://mathjax.schullv.de/b59158ca14a7bb9d1b5068e24208333b865f03e46f3370808a1b1c05fa7ac702?color=5a5a5a) Kontrolle durch Einsetzen von und
Kontrolle durch Einsetzen von und  in die 3. Zeile:
in die 3. Zeile:
![\(\begin{array}[t]{rll}
-1 - 2t&=& -5,5 - 3s&\\[5pt]
-1 -2\cdot 3&=& -5,5 - 3\cdot \dfrac{1}{2}&\\[5pt]
-7&=& -7
\end{array}\)](https://mathjax.schullv.de/3e59f054fbc64fee0e8354430025cf8ca33d7e04cb40bcaa59db2bcd91c41360?color=5a5a5a) Somit existiert ein Schnittpunkt der beiden Geraden.
Um die genauen Koordinaten des Schnittpunkts
Somit existiert ein Schnittpunkt der beiden Geraden.
Um die genauen Koordinaten des Schnittpunkts  zu berechnen, wird in einsetzt:
zu berechnen, wird in einsetzt:
![\(\begin{array}[t]{rll}
\overrightarrow{OP}&=& \pmatrix{24\\8\\-1} + 3 \cdot \pmatrix{-4\\-3\\-2}&\\[5pt]
&=& \pmatrix{12\\-1\\-7}&\\[5pt]
\end{array}\)](https://mathjax.schullv.de/13344905aa750543eb39ffb1ef06c0f035b0f31eb18771f58d64f309f7c11750?color=5a5a5a) Die Koordinaten des Schnittpunkts der beiden Geraden sind somit gegeben durch
Die Koordinaten des Schnittpunkts der beiden Geraden sind somit gegeben durch 
2.3
Würde der Schnittpunkt auf dem Weg des Roboters  zwischen
zwischen  und
und  liegen, müsste folgendes gelten:
liegen, müsste folgendes gelten:
 für ein
für ein  Laut Aufgabenteil 2.2 gilt diese Gleichung jedoch für
Laut Aufgabenteil 2.2 gilt diese Gleichung jedoch für  .
Somit liegt der Schnittpunkt nicht auf dem Weg des Roboters zwischen und .
Roboter
.
Somit liegt der Schnittpunkt nicht auf dem Weg des Roboters zwischen und .
Roboter  erreicht Schnittpunkt zum Zeitpunkt
erreicht Schnittpunkt zum Zeitpunkt  . Um also die Koordinaten des Punktes
. Um also die Koordinaten des Punktes  zu ermitteln, wird für in
zu ermitteln, wird für in  eingesetzt:
eingesetzt:
![\(\begin{array}[t]{rll}
\overrightarrow{ OU}&=&\pmatrix{24\\8\\-1} + \dfrac{1}{2} \cdot \pmatrix{-4\\-3\\-2} & \\[5pt]
&=& \pmatrix{22\\6,5\\-2}
\end{array}\)](https://mathjax.schullv.de/bc71998ab3e491008627259a94affc2ca8910b4351c51c316341b59dcf0496fe?color=5a5a5a) Wenn Roboter den Schnittpunkt erreicht, befindet sich Roboter somit am Punkt
Wenn Roboter den Schnittpunkt erreicht, befindet sich Roboter somit am Punkt 
2.4
Es gilt:
Im Sachzusammenhang entspricht der Winkel  der Steigung, mit der sich der Roboter bezüglich der Wasseroberfläche bewegt.
der Steigung, mit der sich der Roboter bezüglich der Wasseroberfläche bewegt.
2.5
Die Lösung bedeutet, dass sich die Bahnen der beiden Tauchroboter kreuzen und sich beide Tauchroboter zum gleichen Zeitpunkt  in ihrem Schnittpunkt treffen.
in ihrem Schnittpunkt treffen.
3
3.1
Parametergleichung aufstellen
Ebenengleichung bestimmen
Ein Normalenvektor der Ebene lässt sich wie folgt berechnen:
![\(\begin{array}[t]{rll}
\overrightarrow{n}&=& \pmatrix{-4\\-2\\4} \times \pmatrix{3\\2\\0} &\\[5pt]
&=& \pmatrix{(-2)\cdot 0-4\cdot 2\\4\cdot 3-(-4)\cdot 0\\(-4)\cdot 2-(-2)\cdot 3}&\\[5pt]
&=& \pmatrix{-8 \\ 12 \\ -2}
\end{array}\)](https://mathjax.schullv.de/403d3b1d77cd7bca4f62ca13b944264a795a9e890117c759b1e6aa7ab0a35671?color=5a5a5a) Dadurch ergibt sich folgende Koordinatengleichung:
Dadurch ergibt sich folgende Koordinatengleichung:
 Durch Einsetzen von beispielsweise
Durch Einsetzen von beispielsweise  in kann
in kann  berechnet werden:
berechnet werden:
![\(\begin{array}[t]{rll}
c&=& -8 \cdot (-19) + 12 \cdot (-5) - 2 \cdot (-5,5)& \\[5pt]
&=& 103
\end{array}\)](https://mathjax.schullv.de/2571e500cbd8dbedf4b90a7e527c9d31b4695f463c4fe63fd4bb51e3457a8974?color=5a5a5a) Damit lautet eine mögliche Koordinatengleichung der Ebene
Damit lautet eine mögliche Koordinatengleichung der Ebene  beziehungsweise
beziehungsweise 
N: \overrightarrow{x}= \overrightarrow{ON_1}+t\cdot \overrightarrow{N_1N_2}+s\cdot \overrightarrow{N_1N_3}
3.2
Mit der Hesseschen Normalform lässt sich der Abstand des Roboters  zum Netz berechnen:
Somit beträgt die Entfernung des Roboters zum Netz mehr als
zum Netz berechnen:
Somit beträgt die Entfernung des Roboters zum Netz mehr als  .
Folglich lösen die Sensoren keinen Alarm aus.
.
Folglich lösen die Sensoren keinen Alarm aus.