B2 - Analytische Geometrie
1
Mit einem GPS-Empfänger kann man seine Position auf der Erde metergenau bestimmen. Dies geschieht mit Hilfe von Satelliten, die ihre Signale in alle Richtungen zur Erde senden. Je mehr Satelliten empfangen werden können, desto sicherer und genauer wird die Positionsbestimmung. Nimm an, dass sich der Satellit NAVSTAR momentan auf der Position  und der Satellit KOSMOS auf
und der Satellit KOSMOS auf  befindet (alle Angaben in km). Ein GPS-Empfänger auf der Erde empfängt die Signale beider Satelliten. Das Signal von NAVSTAR wird aus Richtung des Vektors
befindet (alle Angaben in km). Ein GPS-Empfänger auf der Erde empfängt die Signale beider Satelliten. Das Signal von NAVSTAR wird aus Richtung des Vektors  empfangen und das von KOSMOS aus Richtung des Vektors
empfangen und das von KOSMOS aus Richtung des Vektors 
1.1
Gib eine Gleichung der Geraden an, die von  aus in Richtung des Vektors
aus in Richtung des Vektors  verläuft, und beschreibe den Aufbau dieser Gleichung.
verläuft, und beschreibe den Aufbau dieser Gleichung.
(3 BE)
1.2
Zeige, dass sich der GPS-Empfänger auf der Position  befindet.
befindet.
(4 BE)
1.3
Berechne den Abstand des Satelliten KOSMOS zum Empfänger.
(3 BE)
1.4
Berechne, in welchem Winkel zueinander die Signale beim Empfänger eintreffen.
(3 BE)
2
Geocaches sind in der Natur versteckte „Schätze“, die man mittels GPS-Koordinaten finden kann. Man kann sich diese immer beliebter werdende Freizeitbeschäftigung als eine Art elektronische Schatzsuche vorstellen. Die GPS-Koordinaten zu einem Geocache findet man im Internet.
Ein Schatzsucher steht in direkt am Fuße einer steil ansteigenden, mit einigen Bäumen bewachsenen Ebene. In der Nähe der Ebene befindet sich ein Geocache in
direkt am Fuße einer steil ansteigenden, mit einigen Bäumen bewachsenen Ebene. In der Nähe der Ebene befindet sich ein Geocache in  . Von seiner Position in
. Von seiner Position in  aus peilt der Schatzsucher zunächst die beiden in der Ebene liegenden, markanten Punkte
aus peilt der Schatzsucher zunächst die beiden in der Ebene liegenden, markanten Punkte  und
und  an. (1 LE
an. (1 LE  )
)
Ein Schatzsucher steht in
2.1
Bestimme eine Parametergleichung und eine Koordinatengleichung der Ebene  , die durch die Punkte ,
, die durch die Punkte ,  und
und  verläuft.
verläuft.
![\([\text{zur Kontrolle: } E_1: 3x - 4y + 15z = 6]\)](https://mathjax.schullv.de/e97d9b522d959004b18d3db5cb92acd7b6992db4a269f4f952e5825cf7aa374d?color=5a5a5a)
(5 BE)
2.2
Erläutere die folgenden vier Rechenschritte und die Bedeutung der Rechnung im Sachzusammenhang:
(6 BE)
2.3
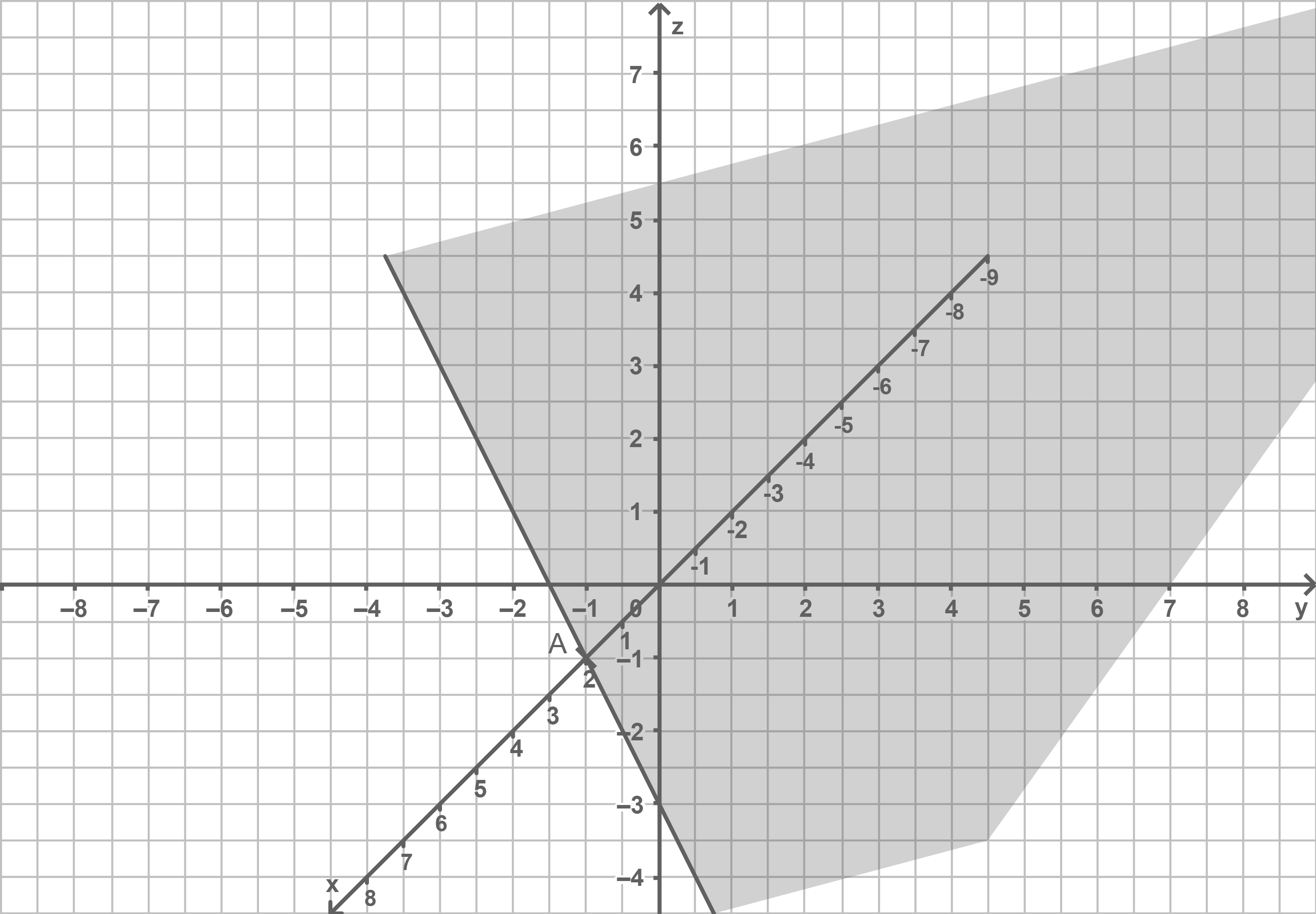
Zeichne die Lage des Geocaches in als Punkt im Material ein. Untersuche rechnerisch, ob der Geocache über, auf oder unter der Erdoberfläche versteckt ist.
Material
(6 BE)
1.1
Geradengleichung angeben
Mit dem Ortsvektor von als Stützvektor und als Richtungsvektor folgt als Geradengleichung:




 Aufbau beschreiben
Aufbau beschreiben
ist der Ortsvektor eines beliebigen Punktes der Geraden
.
ist der Stützvektor der Geraden
Damit liegt der Punkt
ist eine Variable die alle reelen Zahlen annehmen kann und somit den Richtungsvektor beliebig strecken und stauchen kann.
1.2
Das zweite Signal kann durch die Gerade  die vom Punkt
die vom Punkt  aus in Richtung
aus in Richtung  verläuft, beschrieben werden. Da der GPS-Empfänger auf beiden Geraden liegt, reicht es eine Punktprobe durchzuführen und zu zeigen, dass die Geraden und
verläuft, beschrieben werden. Da der GPS-Empfänger auf beiden Geraden liegt, reicht es eine Punktprobe durchzuführen und zu zeigen, dass die Geraden und  verschieden sind.
1. Schritt: Geradengleichung von aufstellen
Mit
verschieden sind.
1. Schritt: Geradengleichung von aufstellen
Mit  als Stützvektor und als Richtungsvektor folgt:
als Stützvektor und als Richtungsvektor folgt:




 2. Schritt: Punktproben durchführen
Die Punktprobe von
2. Schritt: Punktproben durchführen
Die Punktprobe von  bezüglich liefert:
Der Punkt liegt auf der Geraden
bezüglich liefert:
Der Punkt liegt auf der Geraden  da für
da für  alle drei Gleichungen erfüllt sind.
Für die Punktprobe bezüglich folgt:
Für
alle drei Gleichungen erfüllt sind.
Für die Punktprobe bezüglich folgt:
Für  sind alle drei Gleichungen erfüllt und der Punkt liegt damit auch auf der Geraden
sind alle drei Gleichungen erfüllt und der Punkt liegt damit auch auf der Geraden  3. Schritt: Lineare Unabhängigkeit zeigen
Wenn die beiden Richtungsvektoren linear abhängig wären, existiert ein
3. Schritt: Lineare Unabhängigkeit zeigen
Wenn die beiden Richtungsvektoren linear abhängig wären, existiert ein  mit dem folgt:
mit dem folgt:

 Das gesuchte müsste aufgrund der Gleichung der ersten beiden Komponenten negativ sein, wegen der Gleichung der dritten Komponente aber positiv. Somit kann es kein solches geben und die Richtungsvektoren sind linear unabhängig, das heißt die Geraden und sind verschieden. Damit liegt der GPS-Empfänger im Punkt
Das gesuchte müsste aufgrund der Gleichung der ersten beiden Komponenten negativ sein, wegen der Gleichung der dritten Komponente aber positiv. Somit kann es kein solches geben und die Richtungsvektoren sind linear unabhängig, das heißt die Geraden und sind verschieden. Damit liegt der GPS-Empfänger im Punkt 
1.3
Der gesuchte Abstand beträgt damit ca. 
1.4
Der Winkel zwischen den Richtungsvektoren, und damit auch der Winkel zwischen den beiden Geraden in dem Punkt in dem die Signale aufeinandertreffen, beträgt ca. 
2.1
Parametergleichung bestimmen
Da die Punkte  und in der Ebene liegen, folgt mit
und in der Ebene liegen, folgt mit  als Stützvektor und
als Stützvektor und  und
und  eine Parameterform der Ebene. Die Berechnung der Spannvektoren liefert:
eine Parameterform der Ebene. Die Berechnung der Spannvektoren liefert:









 Einsetzen in die Parameterform liefert:
Einsetzen in die Parameterform liefert:






 Koordinatengleichung bestimmen
Mit Hilfe des crossP-Befehls des CAS folgt für den Normalenvektor
Koordinatengleichung bestimmen
Mit Hilfe des crossP-Befehls des CAS folgt für den Normalenvektor  der Ebene:
der Ebene:




_2015_b2_l1b1_ti.png) Einsetzen von
Einsetzen von  in die Ebenengleichung liefert dann:
in die Ebenengleichung liefert dann:






 Einsetzen in die allgemeine Koordinatenform liefert das Ergebnis:
Einsetzen in die allgemeine Koordinatenform liefert das Ergebnis:




2.2
Rechenschritte erläutern
Im ersten Schritt wird der Normalenvektor der Ebene abgelesen, das hießt im Sachzusammenhang der Normalenvektor der steil ansteigenden mit Bäumen bewachsenen Ebene.
Im zweiten Schritt wird nun der Normalenvektor der- -Ebene
-Ebene  abgelesen, welche im Sachzusammenhang die Erdoberfläche darstellt.
abgelesen, welche im Sachzusammenhang die Erdoberfläche darstellt.
Der dritte Schritt führt die Berechnung des Schnittwinkels der beiden Ebenen mit Hilfe derer Normalenvektoren durch. Im Sachzusammenhang wird hier überprüft, unter welchem Winkel die mit Bäumen bewachsene Ebene gegenüber der Erdoberfläche ansteigt.
Im letzten Schritt wird der Tangens des Schnittwinkels berechnet, das heißt die prozentuale Steigung der mit Bäumen bewachsenen Ebene. Diese hat also eine Steigung von gegenüber der Erdoberfläche.
gegenüber der Erdoberfläche.
Im zweiten Schritt wird nun der Normalenvektor der
Der dritte Schritt führt die Berechnung des Schnittwinkels der beiden Ebenen mit Hilfe derer Normalenvektoren durch. Im Sachzusammenhang wird hier überprüft, unter welchem Winkel die mit Bäumen bewachsene Ebene gegenüber der Erdoberfläche ansteigt.
Im letzten Schritt wird der Tangens des Schnittwinkels berechnet, das heißt die prozentuale Steigung der mit Bäumen bewachsenen Ebene. Diese hat also eine Steigung von
2.3
Geocache einzeichnen
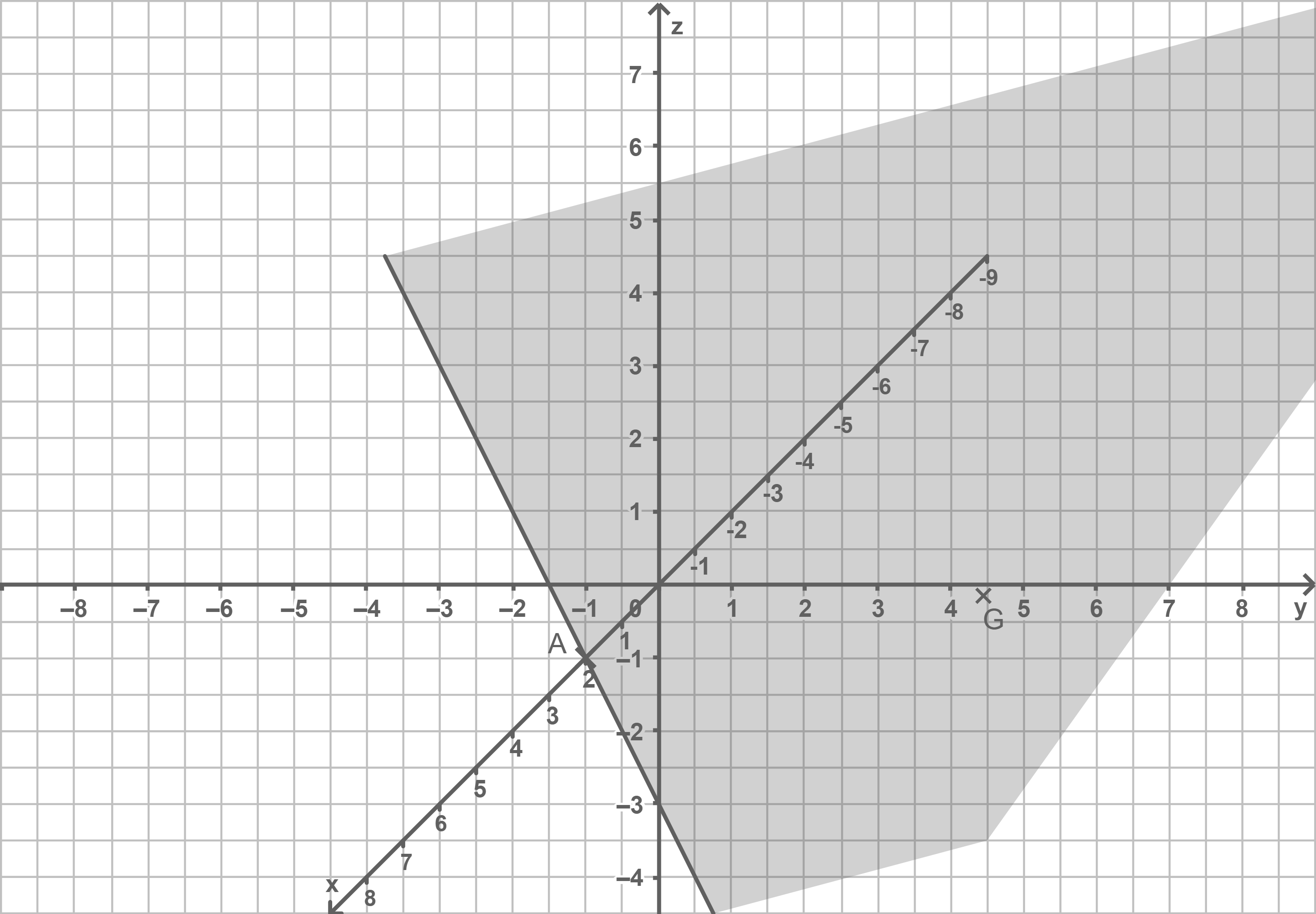 Die Lage des Geocaches im Punkt
Die Lage des Geocaches im Punkt  kann mit Hilfe der Lotgeraden zur --Ebene bestimmt werden.
1. Schritt: Lotgerade aufstellen
Da die Lotgerade zur --Ebene durch orthogonal zur --Ebene ist, folgt:
kann mit Hilfe der Lotgeraden zur --Ebene bestimmt werden.
1. Schritt: Lotgerade aufstellen
Da die Lotgerade zur --Ebene durch orthogonal zur --Ebene ist, folgt:


 2. Schritt: Schnittpunkt von und bestimmen
Einsetzen eines allgemeinen Punktes
2. Schritt: Schnittpunkt von und bestimmen
Einsetzen eines allgemeinen Punktes  der Geraden in die Koordinatengleichung
der Geraden in die Koordinatengleichung 


 und Auflösen nach
und Auflösen nach  liefert:
Der Schnittpunkt hat somit die Koordinaten
liefert:
Der Schnittpunkt hat somit die Koordinaten  Da
Da  negativ ist, liegt der Punkt
negativ ist, liegt der Punkt  und damit das Geocache, oberhalb der Ebene
und damit das Geocache, oberhalb der Ebene  also über der Erdoberfläche.
also über der Erdoberfläche.
1.1
Geradengleichung angeben
Mit dem Ortsvektor von als Stützvektor und als Richtungsvektor folgt als Geradengleichung:
Aufbau beschreiben
1.2
Das zweite Signal kann durch die Gerade die vom Punkt aus in Richtung verläuft, beschrieben werden. Da der GPS-Empfänger auf beiden Geraden liegt, reicht es eine Punktprobe durchzuführen und zu zeigen, dass die Geraden und verschieden sind.
1. Schritt: Geradengleichung von aufstellen
Mit als Stützvektor und als Richtungsvektor folgt:
2. Schritt: Punktproben durchführen
Die Punktprobe von bezüglich liefert:
Der Punkt liegt auf der Geraden da für alle drei Gleichungen erfüllt sind.
Für die Punktprobe bezüglich folgt:
Für sind alle drei Gleichungen erfüllt und der Punkt liegt damit auch auf der Geraden
3. Schritt: Lineare Unabhängigkeit zeigen
Wenn die beiden Richtungsvektoren linear abhängig wären, existiert ein mit dem folgt:
Das gesuchte müsste aufgrund der Gleichung der ersten beiden Komponenten negativ sein, wegen der Gleichung der dritten Komponente aber positiv. Somit kann es kein solches geben und die Richtungsvektoren sind linear unabhängig, das heißt die Geraden und sind verschieden. Damit liegt der GPS-Empfänger im Punkt
1.3
Der gesuchte Abstand beträgt damit ca.
1.4
Mit Hilfe des CAS unter Interactive  Vector angle folgt für den Winkel
Vector angle folgt für den Winkel  zwischen den Richtungsvektoren:
zwischen den Richtungsvektoren:

_2015_b2_l1b1_casio.png) Der Winkel zwischen den Richtungsvektoren, und damit auch der Winkel zwischen den beiden Geraden in dem Punkt in dem die Signale aufeinandertreffen, beträgt ca.
Der Winkel zwischen den Richtungsvektoren, und damit auch der Winkel zwischen den beiden Geraden in dem Punkt in dem die Signale aufeinandertreffen, beträgt ca.
2.1
Parametergleichung bestimmen
Da die Punkte und in der Ebene liegen, folgt mit als Stützvektor und und eine Parameterform der Ebene. Die Berechnung der Spannvektoren liefert:
Einsetzen in die Parameterform liefert:
Koordinatengleichung bestimmen
Mit Hilfe des crossP-Befehls des CAS folgt für den Normalenvektor der Ebene:
Einsetzen von in die Ebenengleichung liefert dann:
Einsetzen in die allgemeine Koordinatenform liefert das Ergebnis:
2.2
Rechenschritte erläutern
Im ersten Schritt wird der Normalenvektor der Ebene abgelesen, das hießt im Sachzusammenhang der Normalenvektor der steil ansteigenden mit Bäumen bewachsenen Ebene.
Im zweiten Schritt wird nun der Normalenvektor der--Ebene abgelesen, welche im Sachzusammenhang die Erdoberfläche darstellt.
Der dritte Schritt führt die Berechnung des Schnittwinkels der beiden Ebenen mit Hilfe derer Normalenvektoren durch. Im Sachzusammenhang wird hier überprüft, unter welchem Winkel die mit Bäumen bewachsene Ebene gegenüber der Erdoberfläche ansteigt.
Im letzten Schritt wird der Tangens des Schnittwinkels berechnet, das heißt die prozentuale Steigung der mit Bäumen bewachsenen Ebene. Diese hat also eine Steigung von gegenüber der Erdoberfläche.
Im zweiten Schritt wird nun der Normalenvektor der
Der dritte Schritt führt die Berechnung des Schnittwinkels der beiden Ebenen mit Hilfe derer Normalenvektoren durch. Im Sachzusammenhang wird hier überprüft, unter welchem Winkel die mit Bäumen bewachsene Ebene gegenüber der Erdoberfläche ansteigt.
Im letzten Schritt wird der Tangens des Schnittwinkels berechnet, das heißt die prozentuale Steigung der mit Bäumen bewachsenen Ebene. Diese hat also eine Steigung von
2.3
Geocache einzeichnen
Die Lage des Geocaches im Punkt kann mit Hilfe der Lotgeraden zur --Ebene bestimmt werden.
1. Schritt: Lotgerade aufstellen
Da die Lotgerade zur --Ebene durch orthogonal zur --Ebene ist, folgt:
2. Schritt: Schnittpunkt von und bestimmen
Einsetzen eines allgemeinen Punktes der Geraden in die Koordinatengleichung und Auflösen nach liefert:
Der Schnittpunkt hat somit die Koordinaten Da negativ ist, liegt der Punkt und damit das Geocache, oberhalb der Ebene also über der Erdoberfläche.